PostureCoach: Holistic Posture Mentoring in Delivering Personalised Interventions
"PostureCoach is an AI-enabled wearable health platform that combines custom sensing hardware, biomechanical interpretation, and cloud-based feedback to deliver personalised, non-invasive posture intervention."
PostureCoach is an AI-enabled posture mentoring platform developed to support personalised interventions for musculoskeletal health. The system addresses poor posture and back-pain-related wellbeing by combining wearable sensing, biomechanical modelling, cloud-based feedback, and privacy-aware longitudinal tracking. Rather than treating posture as a one-size-fits-all problem, the project considers individual differences such as body type, habits, gender, work routines, and ergonomic contexts.
The project sits within AiDLab and was developed through a collaboration between the Hong Kong University of Science and Technology and the Royal College of Art Computer Science Research Centre. The research direction connects AI, wearable electronics, human-centred design, and digital health, with the RCA project page describing PostureCoach as a cloud-connected wearable system for modelling postural behaviour in three-dimensional environments.
The platform was shaped through iterative prototyping and stakeholder-informed workshops. Its sensing approach combines wearable capture with biomechanical interpretation, while the cloud infrastructure supports real-time feedback, continuous model training, and anonymised data access for further research. The design goal is to keep the intervention non-invasive, inclusive, and comfortable across different bodies, abilities, and daily working conditions.
Yitong's role
Yitong joined the project team as a Research Assistant and served as the Wearable Electronics Engineer. His work focused on the physical sensing and electronics layer of the system, translating posture-monitoring requirements into wearable hardware prototypes that could be assembled, tested, and iterated with the wider research team.
- Designed and iterated PCB layouts for wearable posture-sensing prototypes.
- Assembled, debugged, and tested wearable electronics for data capture and feedback workflows.
- Integrated sensors into wearable form factors while considering comfort, placement, and signal reliability.
- Developed prototype housings and mechanical enclosures for embedded electronics.
- Supported hardware bring-up, calibration, circuit construction, and iterative prototyping across project phases.
Outputs and engagement
RCA documents the project through research outputs including a systematic review on wearable devices for spinal postural analysis, a personalised posture workshop, a patent-stage innovation output, and public demonstrations across research, technology, and AI-design venues. These outputs position PostureCoach as both a wearable health research platform and a design-led system for personalised posture intervention.
Concept of PCB Design
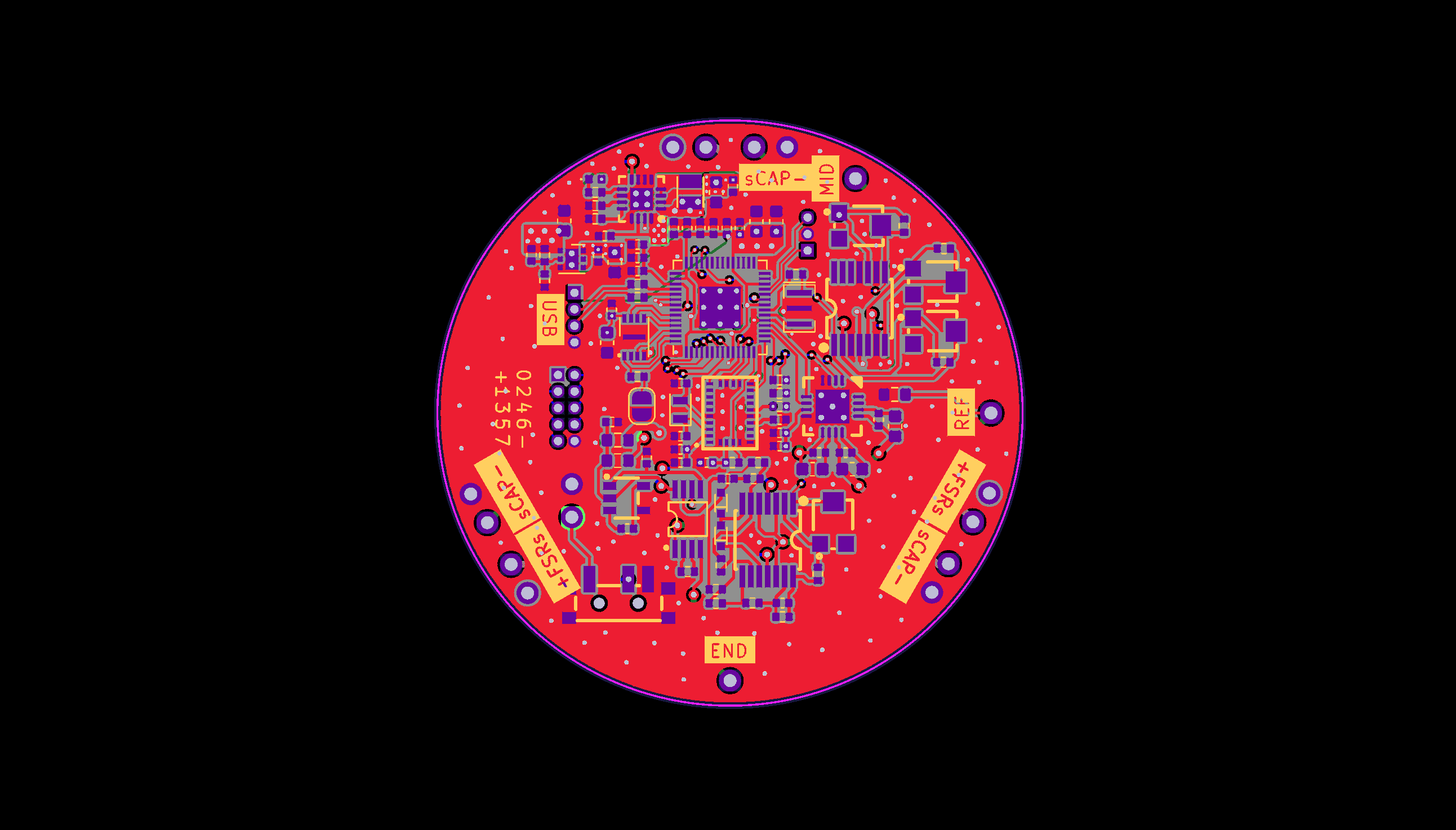
The Posture Coach hardware is built around a custom-designed four-layer PCB that integrates sensing, signal conditioning, power management, and wireless communication into a compact wearable form factor. The board was designed to support reliable acquisition of low-amplitude biomedical and pressure signals while maintaining stable power delivery and robust Bluetooth connectivity.
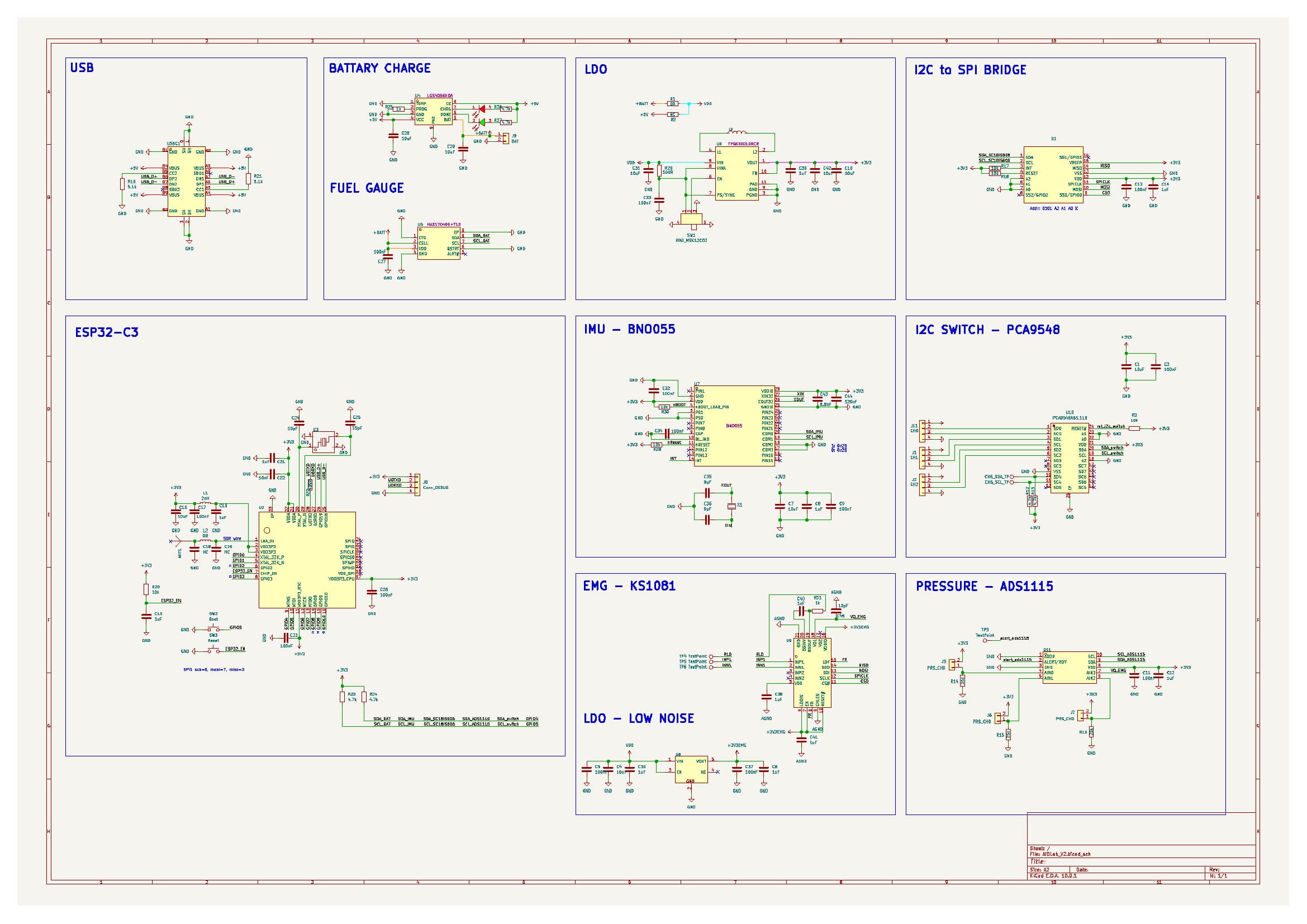
The PCB includes an ESP32-C3 microcontroller as the main processing and wireless communication unit, an IMU module for motion and orientation tracking, EMG signal acquisition circuitry, pressure-sensing interfaces, battery charging and fuel-gauge circuits, low-noise voltage regulation, USB connectivity, and I²C/SPI peripheral expansion. The four-layer structure provides improved routing density, controlled return paths, reduced electromagnetic interference, and better separation between analog, digital, and power domains.
A key design objective was to preserve signal integrity for the EMG and pressure-sensing channels. EMG signals are extremely small and sensitive to noise, so the analog front-end was placed and routed with careful attention to grounding, trace length, shielding, and separation from high-speed digital lines. Pressure-sensor signals are also routed through a dedicated analog path to minimize coupling from the MCU, Bluetooth radio, and switching or charging circuits. Analog and digital sections are physically partitioned on the PCB, with dedicated local decoupling and controlled ground return paths to reduce crosstalk.
Power integrity was another major consideration. The board includes battery charging, fuel monitoring, and regulated voltage rails designed to support both low-noise sensing and efficient wearable operation. Low-noise regulation is used for sensitive analog circuits, while digital and wireless subsystems are supplied through separate power paths with localized bypass capacitors. This helps reduce power-supply ripple that could otherwise degrade EMG or pressure measurements. The power architecture was also optimized for battery-powered use, balancing sensing performance, Bluetooth communication reliability, and overall runtime.
Bluetooth communication through the ESP32-C3 was considered during board layout as well. The RF section was kept clear of dense routing and noisy analog circuitry where possible, with attention to antenna placement, ground clearance, and nearby copper features. This improves wireless stability while allowing the board to remain compact enough for wearable integration.
Overall, this PCB is not only a carrier board for sensors, but a system-level hardware platform designed for reliable multi-modal posture monitoring. Its architecture combines biomedical signal acquisition, pressure sensing, inertial measurement, embedded processing, wireless communication, and portable power management in a single integrated design.
Main PCB Subsystems
- Main controller and wireless communication: ESP32-C3 microcontroller with Bluetooth connectivity.
- Motion sensing: IMU module for posture and orientation tracking.
- EMG acquisition: dedicated analog front-end for low-amplitude muscle-signal measurement.
- Pressure sensing: ADC-based pressure signal interface.
- Peripheral expansion: I²C switch and I²C-to-SPI bridge for modular sensor communication.
- Power management: battery charging, fuel gauge, low-noise LDO regulation, and USB power input.
- Four-layer PCB stack-up: designed for improved grounding, signal integrity, EMI reduction, and compact routing.
Design Considerations
The PCB layout was designed with particular attention to the following constraints:
- Isolation between EMG and pressure-sensing channels.
- Separation of analog and digital signal domains.
- Reduced coupling from Bluetooth, MCU clocking, and communication buses.
- Low power-supply ripple for sensitive analog measurements.
- Stable battery operation and extended runtime.
- Reliable Bluetooth communication in a compact wearable form factor.
- Clean routing for I²C, SPI, ADC, and sensor-interface signals.
- Local decoupling and power filtering near critical ICs.
- Compact mechanical layout suitable for integration into the Posture Coach device.